Formula Student … Driverless?
In der Saison 2017 hat sich das Team das erste Mal der Herausforderung gestellt, einen Rennwagen autonom fahren zu lassen. Zu diesem Zweck wurde der aus der vorherigen Saison stammende Rennwagen, der eH16, modifiziert und mit einem gänzlich neu entwickelten autonomen System ausgestattet. Dem eH16d gelang es in dem Pilotprojekt Formula Student Driverless in Hockenheim mit seinem herausragenden Konzept zu überzeugen und den 6. Platz zu belegen.
Vision
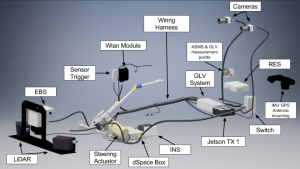
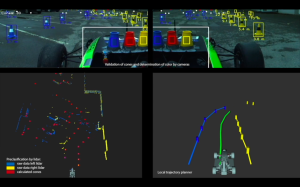 Ein autonom entscheidendes Fahrermodell muss den Fahrer ersetzen – dazu gehören auch die Fähigkeiten, die Straße sehen und Hindernisse erkennen zu können. Im eH16d wird diese Anforderung über ein System aus zwei Stereokameras erfüllt. Durch den Einsatz der Kameras ist es möglich, ein dreidimensionales Bild zu erzeugen. Allerdings ist zusätzlich eine exakte Kalibrierung der beiden Signale notwendig. Während der Fahrt berechnet ein Stereo Matching Algorithmus aus den Aufnahmen die Tiefe aller sich in Sichtweite befindlichen Objekte. Auf den Rennstrecken der Formula Student handelt es sich dabei um Linien und verschiedenfarbige Hütchen. Die aufgenommenen Daten werden mit den Informationen aus zwei Laser-Scannern, einer IMU und einem SLAM-Algorithmus abgeglichen und dienen der Berechnung des Streckenverlaufs, der Geschwindigkeit und Ideallinie.
Ein autonom entscheidendes Fahrermodell muss den Fahrer ersetzen – dazu gehören auch die Fähigkeiten, die Straße sehen und Hindernisse erkennen zu können. Im eH16d wird diese Anforderung über ein System aus zwei Stereokameras erfüllt. Durch den Einsatz der Kameras ist es möglich, ein dreidimensionales Bild zu erzeugen. Allerdings ist zusätzlich eine exakte Kalibrierung der beiden Signale notwendig. Während der Fahrt berechnet ein Stereo Matching Algorithmus aus den Aufnahmen die Tiefe aller sich in Sichtweite befindlichen Objekte. Auf den Rennstrecken der Formula Student handelt es sich dabei um Linien und verschiedenfarbige Hütchen. Die aufgenommenen Daten werden mit den Informationen aus zwei Laser-Scannern, einer IMU und einem SLAM-Algorithmus abgeglichen und dienen der Berechnung des Streckenverlaufs, der Geschwindigkeit und Ideallinie.
Lenkung
 Beim eH16D wird für die Lenkung eine elektrische Servolenkung aus einem PKW verwendet und so modifiziert, dass nur wesentlichen Bestandteile übernommen werden mussten. Da das Reglement der Formula Student Driverless den Studenten vorgibt, dass das Fahrzeug im nicht-autonomen Betrieb trotzdem von einem Fahrer gesteuert werden muss, ist eine Anpassung der Lenksäule notwendig. Dafür wird das untere Ende der Lenksäule durch ein Getriebe ergänzt und so mit einem Flansch versehen, sodass es an die bestehende Säule angebaut werden kann. Das notwenige Drehmoment für die Lenkbewegung wird über das untersetzte Schneckengetriebe von einem separat angesteuerten Servomotor geliefert. Die Steuerung der Lenkbewegungen erfolgt im autonomen Betrieb über eine Busverbindung zum Hauptsteuergerät.
Beim eH16D wird für die Lenkung eine elektrische Servolenkung aus einem PKW verwendet und so modifiziert, dass nur wesentlichen Bestandteile übernommen werden mussten. Da das Reglement der Formula Student Driverless den Studenten vorgibt, dass das Fahrzeug im nicht-autonomen Betrieb trotzdem von einem Fahrer gesteuert werden muss, ist eine Anpassung der Lenksäule notwendig. Dafür wird das untere Ende der Lenksäule durch ein Getriebe ergänzt und so mit einem Flansch versehen, sodass es an die bestehende Säule angebaut werden kann. Das notwenige Drehmoment für die Lenkbewegung wird über das untersetzte Schneckengetriebe von einem separat angesteuerten Servomotor geliefert. Die Steuerung der Lenkbewegungen erfolgt im autonomen Betrieb über eine Busverbindung zum Hauptsteuergerät.
Elektronisches Bremssystem (EBS)
Da sich der Wagen vollkommen autonom bewegen soll, ist es notwendig, die zuvor von einer Person ausgeführten Bremseingriffe durch ein elektro-hydraulisches System zu automatisieren. Weiterhin muss das Fahrzeug in einer Gefahrensituation oder bei einem Fehlverhalten des autonomen Systems über eine Notbremsfunktion zum Stillstand gebracht werden können. Das Bremssteuergerät erhält Informationen über den jeweiligen Zustand (Teilbremsung, Notbremsung) und berechnet den in der momentanen Fahrsituation benötigten Solldruck für jede Radbremse. Anschließend regelt eine Hydraulikeinheit individuell den für jedes Rad benötigten Bremsdruck. Drucksensoren, die in jeder Bremsleitung verbaut sind, ermitteln den Ist-Druck, so dass der Solldruck für jedes Rad nachgeregelt werden kann. Der für die Versorgung der Bremsen notwenige Druck wird durch eine Hochdruckpumpe erzeugt, die an einen Druckspeicher angebunden ist, der komprimiertes Gas beinhaltet. Der Druckspeicher stellt dem Brems-system genügend Energie zur Verfügung, um das Fahrzeug auch bei einem Ausfall der Pumpe mindestens einmal zum Stillstand bringen zu können.