Eine der zukunftsträchtigsten Technologien unserer Zeit ist das autonome Fahren. Nachdem die FSG 2010 den Bereich Electric mit aufgenommen hatte, ließ sie es sich in diesem Jahr nicht nehmen, Technologie und Fortschritt auch im Driverless Bereich zu fördern. Seit diesem Jahr wird offiziell das Event der Formula Student Driverless auf dem Hockenheimring ausgetragen. Auch HorsePower Hannover nutzt die Chance sich in diesem Feld früh zu etablieren und gründete zu Beginn der Saison 2017 einen eigenen Driverless Bereich. Im Januar konnte sich unser Team dann zusammen mit 14 anderen Teams für Hockenheim qualifizieren.
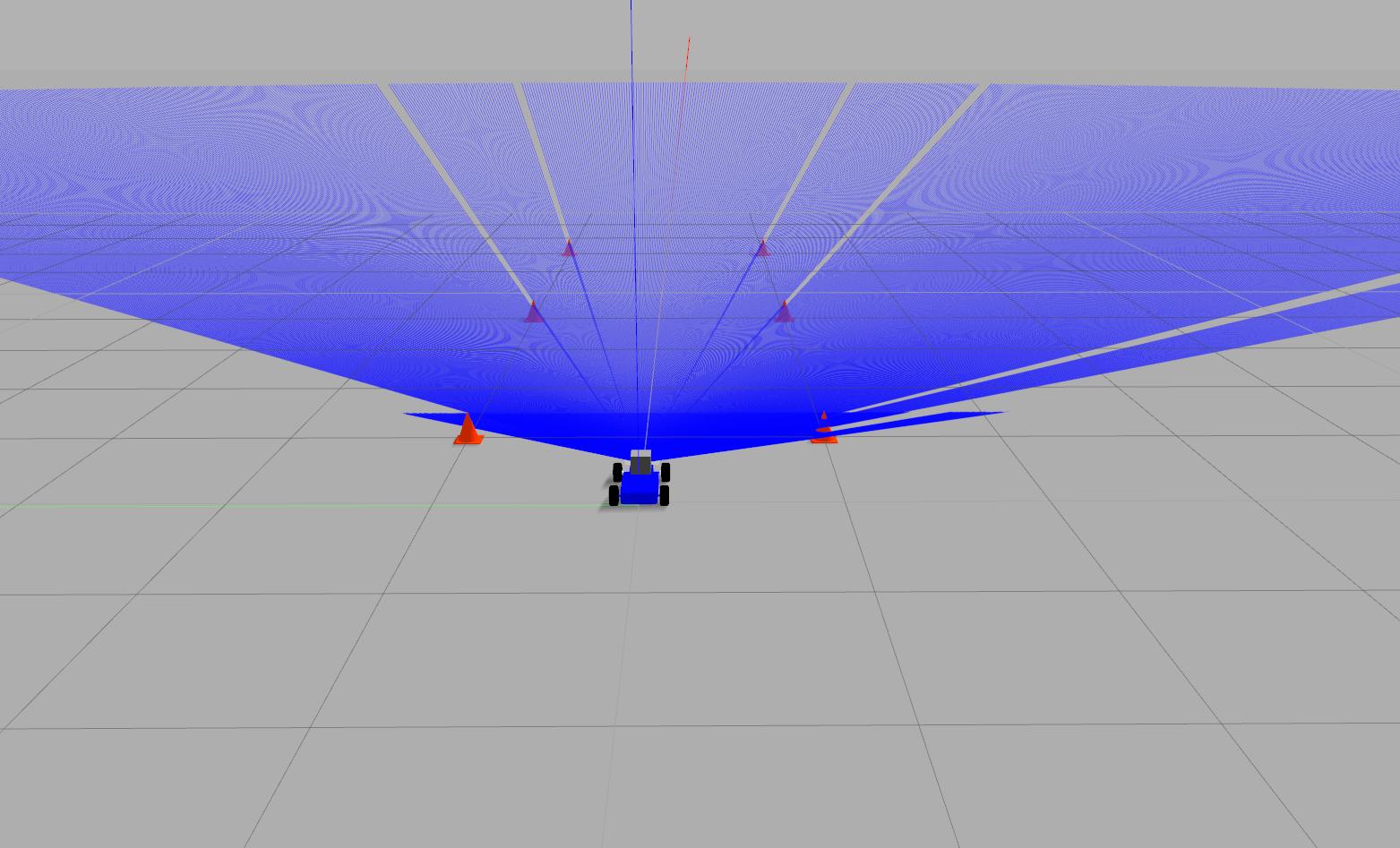 Für das Event wird der eH16, unser Elektrorennwagen der vergangenen Saison, umgerüstet. Bei der Umsetzung des Konzeptes setzen wir in erster Linie auf eine Bildverarbeitung über eine Stereokamera gekoppelt mit einem LiDAR System. Beide Systeme wollen wir in einem Preprocessing direkt miteinander verrechnen und die so gewonnen Daten an die Segmentierung und Filterung weitergeben. Hier werden wir die durch Leitkegel abgesteckte Strecke identifizieren und anschließend die Ideallinie errechnen. Die so gewonnenen Daten, werden im Anschluss von unserem Fahrermodell verarbeitet. Das Fahrermodell verwendet diese Daten, sowie ein im Vorfeld exakt definiertes Fahrzeugmodell, um den eH16 unter Rennbedingungen zu steuern.
Für das Event wird der eH16, unser Elektrorennwagen der vergangenen Saison, umgerüstet. Bei der Umsetzung des Konzeptes setzen wir in erster Linie auf eine Bildverarbeitung über eine Stereokamera gekoppelt mit einem LiDAR System. Beide Systeme wollen wir in einem Preprocessing direkt miteinander verrechnen und die so gewonnen Daten an die Segmentierung und Filterung weitergeben. Hier werden wir die durch Leitkegel abgesteckte Strecke identifizieren und anschließend die Ideallinie errechnen. Die so gewonnenen Daten, werden im Anschluss von unserem Fahrermodell verarbeitet. Das Fahrermodell verwendet diese Daten, sowie ein im Vorfeld exakt definiertes Fahrzeugmodell, um den eH16 unter Rennbedingungen zu steuern.
Für die Datenübermittelung werden wir uns vollständig auf schnelle Kommunikationsprotokolle konzentrieren, insbesondere Ethernet, CAN-Bus und den neuen USB-Standard 3.0, damit eine maximale Datenintegrität gewährleistet wird. Damit auch die nötige Sicherheit gegeben ist, verfügt das autonome System über mehrere Abschaltungsmöglichkeiten am Fahrzeug selbst, sowie über Funk. Bei einem abgeschalteten autonomen System wird sofort die Bremse über einen speziell entwickelten Aktuator blockiert und der eH16 zum Stehen gebracht.
 Aktuell werden von Imaging Development Systems GmbH zur Verfügung gestellte Kameras verwendet. Das Bildmaterial wird mittels zweier Modulsupercomputern, dem Nvidia Jetons TX1 verarbeitet. Die Bildverarbeitung steht bereits in weiten Teilen, doch die Optimierung wird erst in den kommenden Monaten erfolgen.
Aktuell werden von Imaging Development Systems GmbH zur Verfügung gestellte Kameras verwendet. Das Bildmaterial wird mittels zweier Modulsupercomputern, dem Nvidia Jetons TX1 verarbeitet. Die Bildverarbeitung steht bereits in weiten Teilen, doch die Optimierung wird erst in den kommenden Monaten erfolgen.
Die erste Fahrt mit eingebauter Lenk -und Bremsaktuatorik planen wir bereits Ende dieses Monats durchzuführen.
Der gesamte Bereich arbeitet unermüdlich daran, das Projekt früh abzuschließen, um viel Zeit zum Testen zu haben. Wir freuen uns auf unseren ersten selbständig fahrenden Rennwagen!